Optimization
Efficient solutions to large-scale problems.
Much of MERL's research activity involves formulating scientific and engineering problems as optimizations, which can be solved in an efficient way. We have developed fundamental algorithms to better solve classic problems, such as quadratic programs and minimum-cost paths. Our work also involves developing theoretical bounds to understand performance limits.
Quick Links
-
Researchers

Stefano
Di Cairano

Toshiaki
Koike-Akino

Daniel N.
Nikovski

Arvind
Raghunathan

Ankush
Chakrabarty

Philip V.
Orlik

Christopher R.
Laughman

Mouhacine
Benosman

Karl
Berntorp

Kieran
Parsons
Ye
Wang

Yebin
Wang

Matthew
Brand

Scott A.
Bortoff

Petros T.
Boufounos

Devesh K.
Jha

Hassan
Mansour

Pu
(Perry)
Wang
Jianlin
Guo

Diego
Romeres

Hongbo
Sun

Abraham P.
Vinod

Dehong
Liu

Avishai
Weiss

Vedang M.
Deshpande

Yanting
Ma

Hongtao
Qiao

Saviz
Mowlavi

Yuki
Shirai

Gordon
Wichern
William S.
Yerazunis

Jinyun
Zhang

Abraham
Goldsmith

Chungwei
Lin

Bingnan
Wang

Wataru
Tsujita

Jose
Amaya

Anoop
Cherian

Radu
Corcodel

Pedro
Miraldo

Joshua
Rapp

Jing
Liu
-
Awards
-
AWARD MERL Researchers Win Best Workshop Poster Award at the 2023 IEEE International Conference on Robotics and Automation (ICRA) Date: June 2, 2023
Awarded to: Yuki Shirai, Devesh Jha, Arvind Raghunathan and Dennis Hong
MERL Contacts: Devesh K. Jha; Arvind Raghunathan
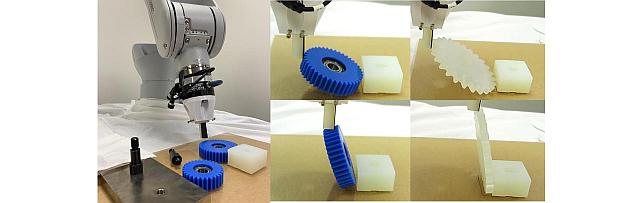
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
The paper presents a technique to manipulate an object using a tool in a closed-loop fashion using vision-based tactile sensors. More information about the workshop and the various speakers can be found here https://sites.google.com/view/icra2023embracingcontacts/home.
- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
-
AWARD Arvind Raghunathan receives Roberto Tempo Best CDC Paper Award at 2022 IEEE Conference on Decision & Control (CDC) Date: December 8, 2022
Awarded to: Arvind Raghunathan
MERL Contact: Arvind Raghunathan
Research Areas: Control, OptimizationBrief- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
The award is given annually in honor of Roberto Tempo, the 44th President of the IEEE Control Systems Society (CSS). The Tempo Award Committee selects the best paper from the previous year's CDC based on originality, potential impact on any aspect of control theory, technology, or implementation, and for the clarity of writing. This year's award committee was headed by Prof. Patrizio Colaneri, Politecnico di Milano. Arvind's paper was nominated for the award by Prof. Lorenz Biegler, Carnegie Mellon University, with supporting letters from Prof. Andreas Waechter, Northwestern University, and Prof. Victor Zavala, University of Wisconsin-Madison.
- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
-
AWARD Outstanding Presentation Award at the 28th Conference of Information Processing Society of Japan/Consumer Device & Systems Date: October 20, 2020
Awarded to: Yukimasa Nagai, Takenori Sumi, Jianlin Guo, Philip Orlik, Hiroshi Mineno
MERL Contacts: Jianlin Guo; Philip V. Orlik
Research Areas: Communications, Optimization, Signal ProcessingBrief- MELCO and MERL researchers have won "Outstanding Presentation Award" at 28th Conference of Information Processing Society of Japan (IPSJ)/Consumer Device & Systems held on September 29-30, 2020. The paper titled "IEEE 802.19.3 Standardization for Coexistence of IEEE 802.11ah and IEEE 802.15.4g Systems in Sub-1 GHz Frequency Bands" reports IEEE 802.19.3 standard development on coexistence between IEEE 802.11ah and IEEE 802.15.4g systems in the Sub-1 GHz frequency bands. MERL and MELCO have been leading this standard development and made major technical contributions, which propose methods to mitigate interference in smart meter systems. The authors are Yukimasa Nagai, Takenori Sumi, Jianlin Guo, Philip Orlik and Hiroshi Mineno.
See All Awards for Optimization -
-
News & Events
-
NEWS Diego Romeres gave an invited talk at the Padua University's Seminar series on "AI in Action" Date: April 9, 2024
MERL Contact: Diego Romeres
Research Areas: Artificial Intelligence, Dynamical Systems, Machine Learning, Optimization, RoboticsBrief- Diego Romeres, Principal Research Scientist and Team Leader in the Optimization and Robotics Team, was invited to speak as a guest lecturer in the seminar series on "AI in Action" in the Department of Management and Engineering, at the University of Padua.
The talk, entitled "Machine Learning for Robotics and Automation" described MERL's recent research on machine learning and model-based reinforcement learning applied to robotics and automation.
- Diego Romeres, Principal Research Scientist and Team Leader in the Optimization and Robotics Team, was invited to speak as a guest lecturer in the seminar series on "AI in Action" in the Department of Management and Engineering, at the University of Padua.
-
NEWS Saviz Mowlavi gave an invited talk at North Carolina State University Date: April 12, 2024
MERL Contact: Saviz Mowlavi
Research Areas: Control, Dynamical Systems, Machine Learning, OptimizationBrief- Saviz Mowlavi was invited to present remotely at the Computational and Applied Mathematics seminar series in the Department of Mathematics at North Carolina State University.
The talk, entitled "Model-based and data-driven prediction and control of spatio-temporal systems", described the use of temporal smoothness to regularize the training of fast surrogate models for PDEs, user-friendly methods for PDE-constrained optimization, and efficient strategies for learning feedback controllers for PDEs.
- Saviz Mowlavi was invited to present remotely at the Computational and Applied Mathematics seminar series in the Department of Mathematics at North Carolina State University.
See All News & Events for Optimization -
-
Research Highlights
-
Internships
-
CA2132: Optimization Algorithms for Motion Planning and Predictive Control
MERL is looking for a highly motivated and qualified individual to work on tailored computational algorithms for optimization-based motion planning and predictive control applications in autonomous systems (vehicles, mobile robots). The ideal candidate should have experience in either one or multiple of the following topics: convex and non-convex optimization, stochastic predictive control (e.g., scenario trees), interaction-aware motion planning, machine learning, learning-based model predictive control, mathematical programs with complementarity constraints (MPCCs), optimal control, and real-time optimization. PhD students in engineering or mathematics, especially with a focus on research related to any of the above topics are encouraged to apply. Publication of relevant results in conference proceedings or journals is expected. Capability of implementing the designs and algorithms in MATLAB/Python is required; coding parts of the algorithms in C/C++ is a plus. The expected duration of the internship is 3 months, and the start date is flexible.
-
MS1851: Dynamic Modeling and Control for Grid-Interactive Buildings
MERL is looking for a highly motivated and qualified candidate to work on modeling for smart sustainable buildings. The ideal candidate will have a strong understanding of modeling renewable energy sources, grid-interactive buildings, occupant behavior, and dynamical systems with expertise demonstrated via, e.g., peer-reviewed publications. Hands-on programming experience with Modelica is preferred. The minimum duration of the internship is 12 weeks; start time is flexible.
-
OR2105: Preference-based Multi-Objective Bayesian Optimization
MERL is looking for a self-motivated and qualified candidate to work on Bayesian Optimization algorithms applied to industrial applications. The ideal candidate is a PhD student with experience and peer-reviewed publications in the general field of derivative-free/zeroth-order optimization, preference will be given to candidates who have contributed to theoretical advances or practical application of Bayesian optimization, especially for multi-objective optimization problems. The ideal candidate will have a strong general understanding of numerical optimization and probabilistic machine learning e.g. Gaussian process regression, and is expected to develop, in collaboration with MERL researchers, state of the art algorithms to optimize parameters for industrial processes or control systems. Proficiency in Python is required. An expected outcome of the internship is one or more peer-reviewed publications. The expected duration is 3-4 months, with flexible starting date.
See All Internships for Optimization -
-
Openings
See All Openings at MERL -
Recent Publications
- , "Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming", Nonlinear Analysis: Hybrid Systems, December 2024.BibTeX TR2024-008 PDF
- @article{Shirai2024dec,
- author = {Shirai, Yuki and Jha, Devesh K. and Raghunathan, Arvind and Romeres, Diego},
- title = {Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming},
- journal = {Nonlinear Analysis: Hybrid Systems},
- year = 2024,
- month = dec,
- url = {https://www.merl.com/publications/TR2024-008}
- }
- , "Hierarchical planning for autonomous parking in dynamic environments", IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2024.3367468, March 2024.BibTeX TR2024-034 PDF
- @article{Wang2024mar2,
- author = {Wang, Yebin and Hansen, Emma and Ahn, Heejin},
- title = {Hierarchical planning for autonomous parking in dynamic environments},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2024,
- month = mar,
- doi = {10.1109/TCST.2024.3367468},
- issn = {1558-0865},
- url = {https://www.merl.com/publications/TR2024-034}
- }
- , "Control Challenges and Opportunities in Building Automation" in The Impact of Automatic Control Research on Industrial Innovation: Enabling a Sustainable Future, February 2024.BibTeX TR2024-011 PDF
- @incollection{Bortoff2024feb,
- author = {Bortoff, Scott A. and Eisenhower, Bryan and Adetola, Veronica and O'Neil, Zheng},
- title = {Control Challenges and Opportunities in Building Automation},
- booktitle = {The Impact of Automatic Control Research on Industrial Innovation: Enabling a Sustainable Future},
- year = 2024,
- month = feb,
- url = {https://www.merl.com/publications/TR2024-011}
- }
- , "Lunar Landing with Feasible Divert using Controllable Sets", AIAA SciTech, DOI: 10.2514/6.2024-0324, January 2024, pp. AIAA 2024-0324.BibTeX TR2024-004 PDF
- @inproceedings{Srinivas2024jan,
- author = {Srinivas, Neeraj and Vinod, Abraham P. and Di Cairano, Stefano and Weiss, Avishai},
- title = {Lunar Landing with Feasible Divert using Controllable Sets},
- booktitle = {AIAA SCITECH 2024 Forum},
- year = 2024,
- pages = {AIAA 2024--0324},
- month = jan,
- doi = {10.2514/6.2024-0324},
- url = {https://www.merl.com/publications/TR2024-004}
- }
- , "Perception-Aware Model Predictive Control for Constrained Control in Unknown Environments", Automatica, DOI: 10.1016/j.automatica.2023.111418, December 2023.BibTeX TR2023-147 PDF
- @article{Bonzanini2023dec,
- author = {Bonzanini, Angelo Domenico and Mesbah, Ali and Di Cairano, Stefano},
- title = {Perception-Aware Model Predictive Control for Constrained Control in Unknown Environments},
- journal = {Automatica},
- year = 2023,
- month = dec,
- doi = {10.1016/j.automatica.2023.111418},
- url = {https://www.merl.com/publications/TR2023-147}
- }
- , "Preference-Guided Bayesian Optimization for Control Policy Learning: Application to Personalized Plasma Medicine", Advances in Neural Information Processing Systems (NeurIPS), December 2023.BibTeX TR2023-146 PDF
- @inproceedings{Shao2023dec,
- author = {Shao, Ketong and Romeres, Diego and Chakrabarty, Ankush and Mesbah, Ali},
- title = {Preference-Guided Bayesian Optimization for Control Policy Learning: Application to Personalized Plasma Medicine},
- booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
- year = 2023,
- month = dec,
- url = {https://www.merl.com/publications/TR2023-146}
- }
- , "Physics-Constrained Deep Autoencoded Kalman Filters for Estimating Vapor Compression System States", IEEE Control Systems Letters, DOI: 10.1109/LCSYS.2023.3334959, November 2023.BibTeX TR2023-138 PDF
- @article{Deshpande2023nov,
- author = {Deshpande, Vedang M. and Chakrabarty, Ankush and Vinod, Abraham P. and Laughman, Christopher R.},
- title = {Physics-Constrained Deep Autoencoded Kalman Filters for Estimating Vapor Compression System States},
- journal = {IEEE Control Systems Letters},
- year = 2023,
- month = nov,
- doi = {10.1109/LCSYS.2023.3334959},
- url = {https://www.merl.com/publications/TR2023-138}
- }
- , "Scalable Optimal Power Management for Large-Scale Battery Energy Storage Systems", IEEE Transactions on Transportation Electrification, DOI: 10.1109/TTE.2023.3331243, November 2023.BibTeX TR2023-137 PDF
- @article{Farakhor2023nov,
- author = {Farakhor, Amir and Wu, Di and Wang, Yebin and Fang, Huazhen},
- title = {Scalable Optimal Power Management for Large-Scale Battery Energy Storage Systems},
- journal = {IEEE Transactions on Transportation Electrification},
- year = 2023,
- month = nov,
- doi = {10.1109/TTE.2023.3331243},
- issn = {2332-7782},
- url = {https://www.merl.com/publications/TR2023-137}
- }
- , "Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming", Nonlinear Analysis: Hybrid Systems, December 2024.
-
Videos
-
Software & Data Downloads